

Agents' dynamics are considered using various motion models. They are appplied to moving humans and vessels.
Multiple interacting agents
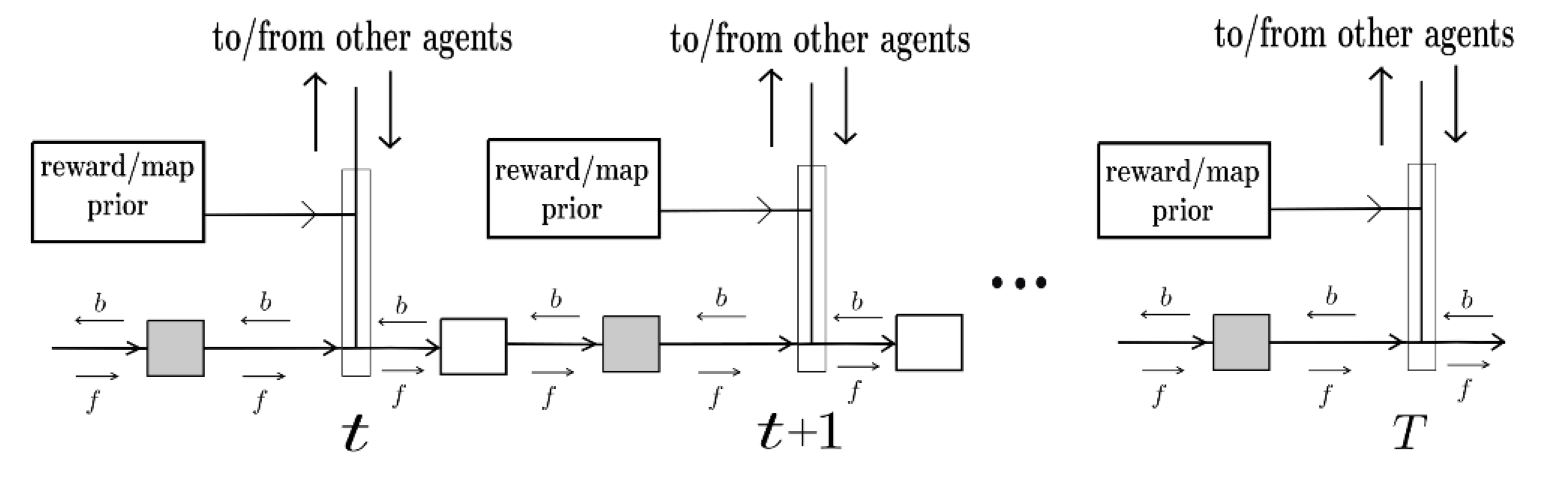
Agents keep in their minds both their own planning model and their best predictions of the others.
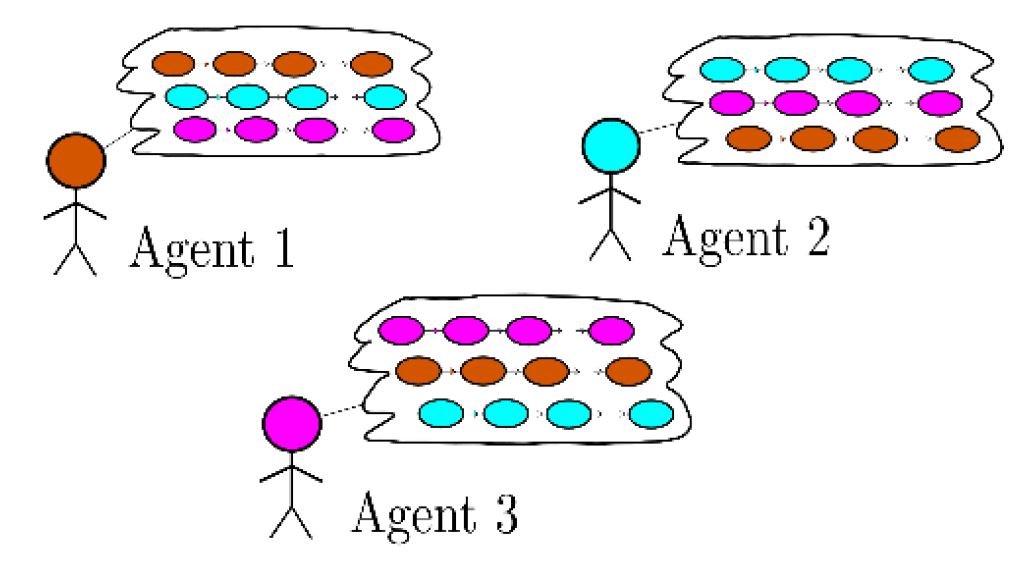
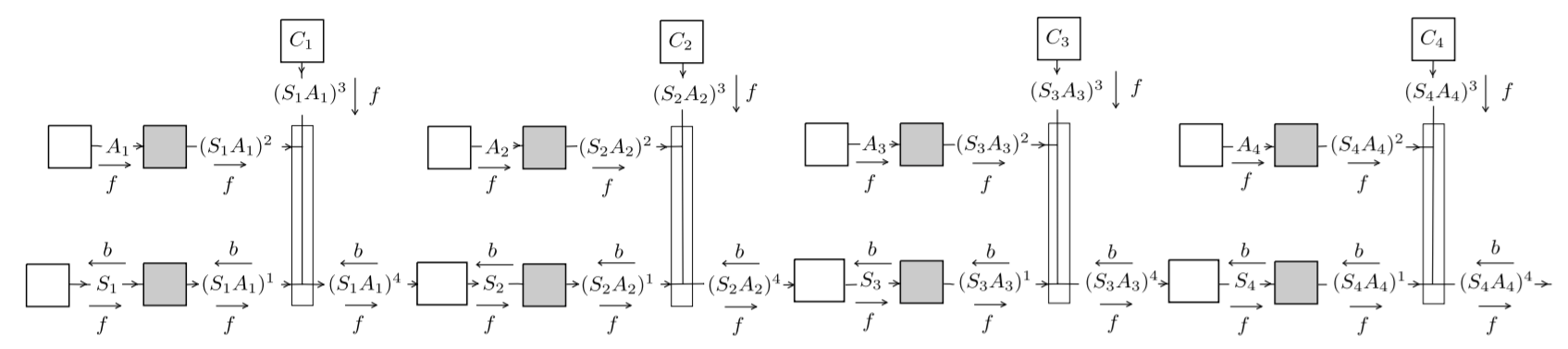
Each agent uses multiple interaction Factor Graphs with probability messages traveling within and across the various models
The following animation shows 3 agents seeking their goals. Interesting non trivial behiors are observed such as: avoiding each other, waiting, passing on higher reward areas (green). Note that this is all the result of the probabilistic flow in the graphs!
- F. A. N. Palmieri, K. R. Pattipati, G. Di Gennaro, A. Buonanno, M. Merola, "Multiple Agents Interacting via Probability Flows on Factor Graphs," Proceedings of the 14th International Conference on Applied Human Factors and Ergonomics (AHFE 2023), July 20-24, 2023, San Francisco, CA, USA.
Unified View of Algorithms for Path Planning
Even if path planning can be solved using standard techniques from dynamic programming and control, the problem can also be approached using probabilistic inference. We look at the specific recursions that arise from various cost functions that, although they may appear similar in scope, bear noticeable differences, at least when applied to typical path planning problems.
We then show how this unified approach, presented both in probability space and in log space, provides a very general framework that includes the Sum-product, the Max-product, Dynamic programming and mixed Reward/Entropy criteria-based algorithms.
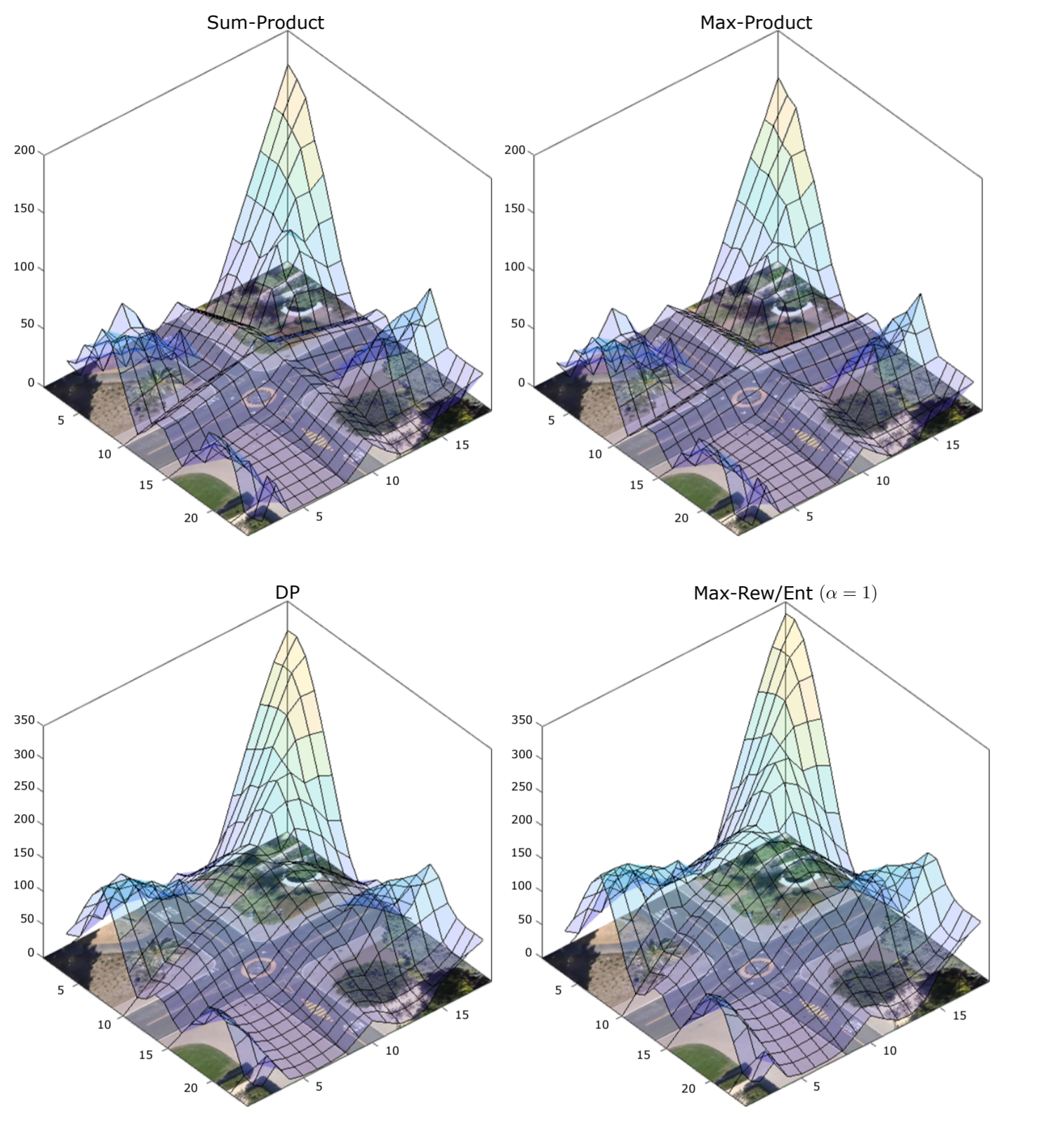
- F.A.N. Palmieri, K.R. Pattipati, G. Di Gennaro, G. Fioretti, F. Verolla and A. Buonanno, "A Unified View of Estimation and Control Using Belief Propagation With Application to Path Planning," in IEEE Access, vol. 10, pp. 15193-15216, 31 Jan. 2022. DOI: 10.1109/ACCESS.2022.3148127
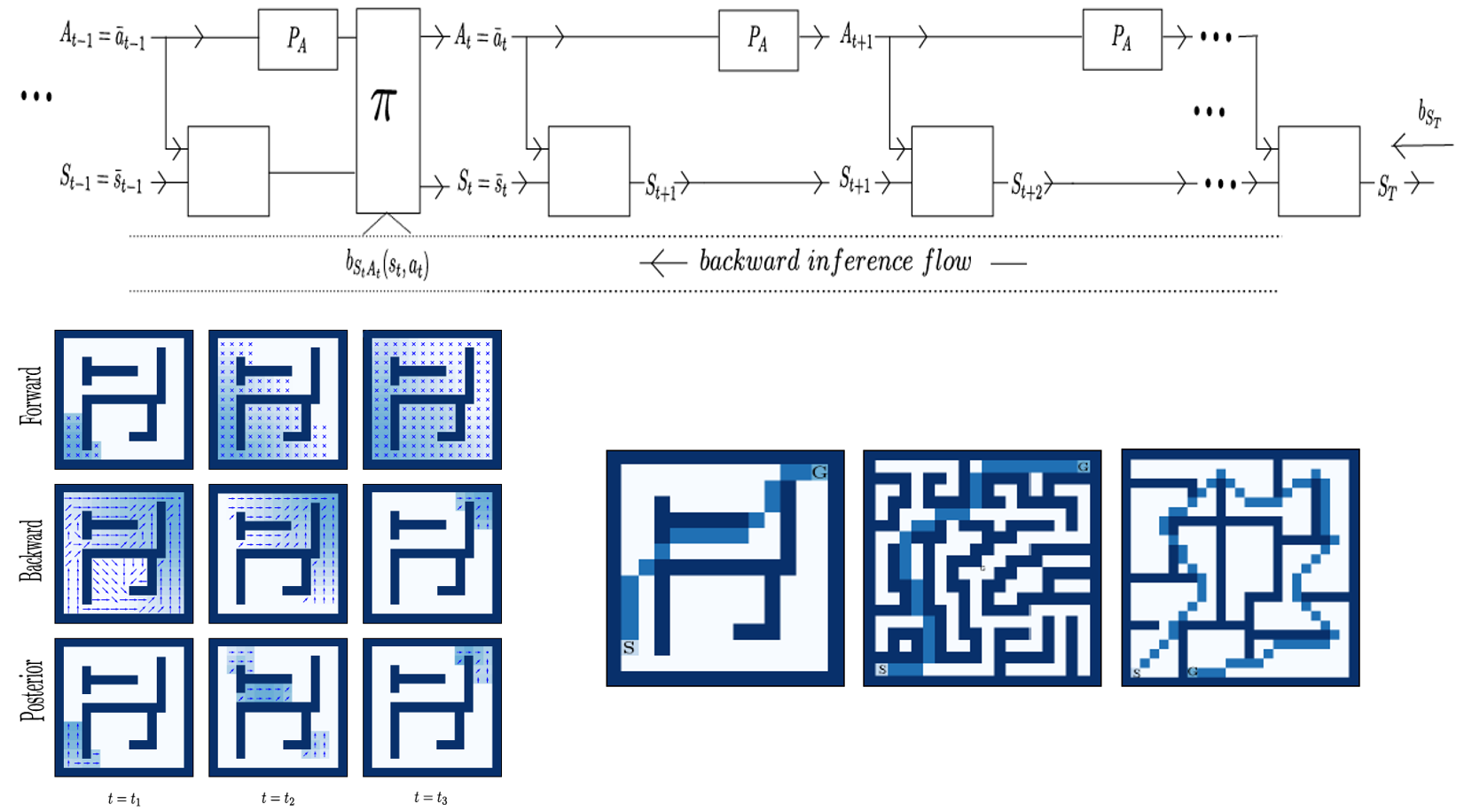
Path Planning with Limited Visibility
We apply probability propagation to the determination of paths in discrete grids with agents' dynamics modeled as Markov Decision Processes. The probability flow is used to determine best solutions when there is only partial knowledge of the obstacle map and the goal. Distributed probability is used in the backward flow to attract the agent towards unknown regions in a sequence of exploration/exploitation steps.
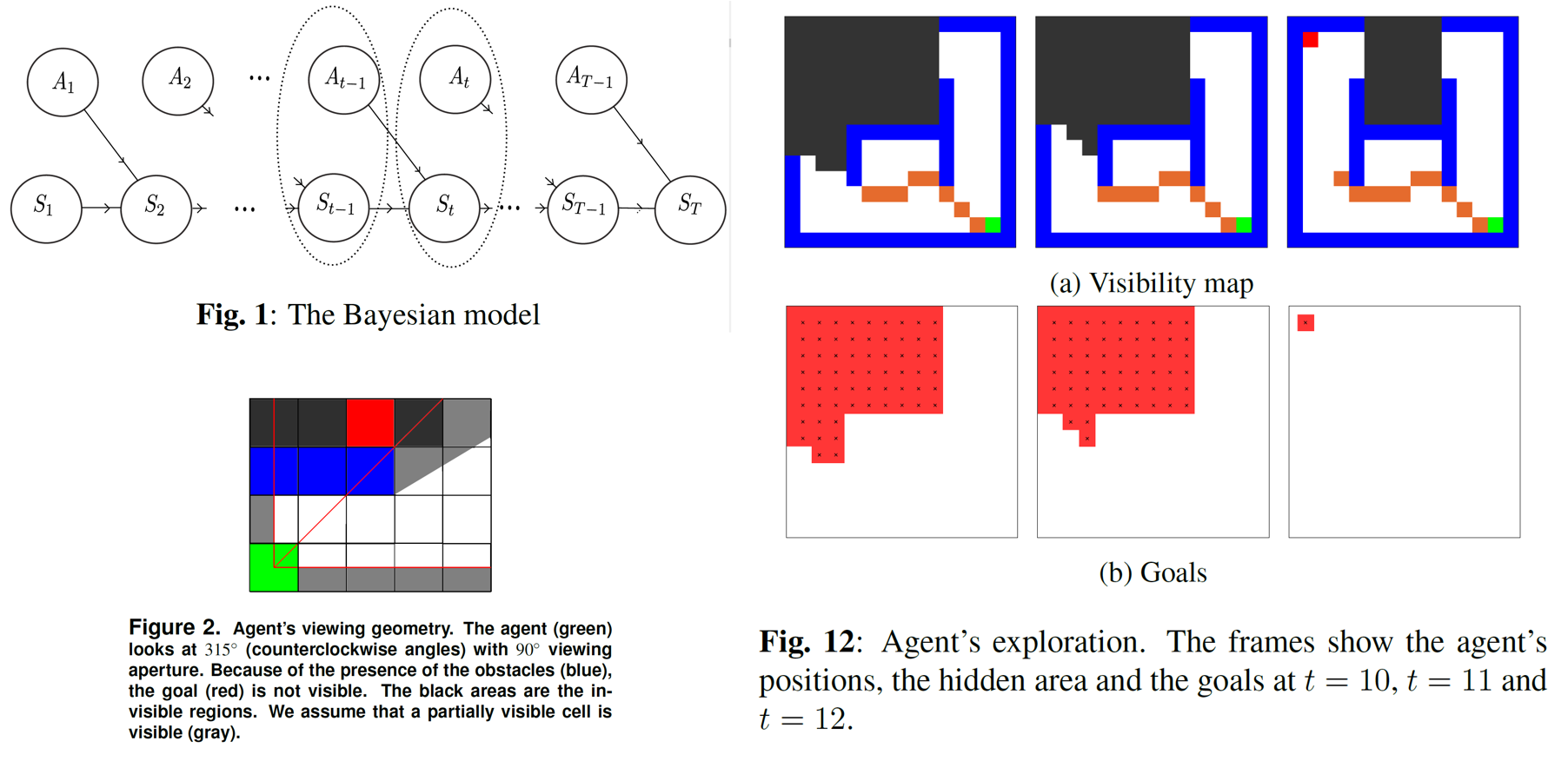
A simulation in which an agent looks for an hidden target.
A simulation where an agent looks for a parking spot in a garage-like grid. The grey pixels are occupied spots and the red ones are free spots (goals).
Other simulations where an agent moves in an unknown environments:
And here the same agent that moves in the same environment, this time completely known.
- F.A.N. Palmieri, K.R. Pattipati, G. Fioretti, F. Verolla, G. Di Gennaro and A. Buonanno, "Exploration/Exploitation in Path Planning Using Probability Propagation," in Proc. IEEE International Conference on Robotics and Automation (ICRA2020), 2nd Workshop on Long-Term Human Motion Prediction (LHMP), June 2, 2020. [Draft available here]
- Giovanni Di Gennaro, Amedeo Buonanno, Giovanni Fioretti, Francesco Verolla, Francesco A.N. Palmieri, Krishna R. Pattipati, "Probability Propagation for Path Planning in Unknown
Environments", submitted for publication
Path Modeling with a Probabilistic Tensor Flow
We have proposed a model for path determination based on probability propagation on a Markov Chain. The backward flow meets with the forward flow and provides guidance to agents in finding best paths. The model has been extended to multiple goals and multiple agents. Behaviors are very realistic and show the real potential of this framework.
A simulation with agents moving in a lattice built to resemble a train station with ticket counters, shops, doors and platforms.
- F.A.N. Palmieri, K.R. Pattipati, G. Fioretti, G. Di Gennaro and A. Buonanno, "Path Planning Using Probability Tensor Flows," in Aerospace and Electronic Systems Magazine, IEEE, vol. 36, no. 1, pp. 34-45, 1 Jan. 2021. DOI: 10.1109/MAES.2020.3032069 [Preliminary Version on arXiv:2003.02774]
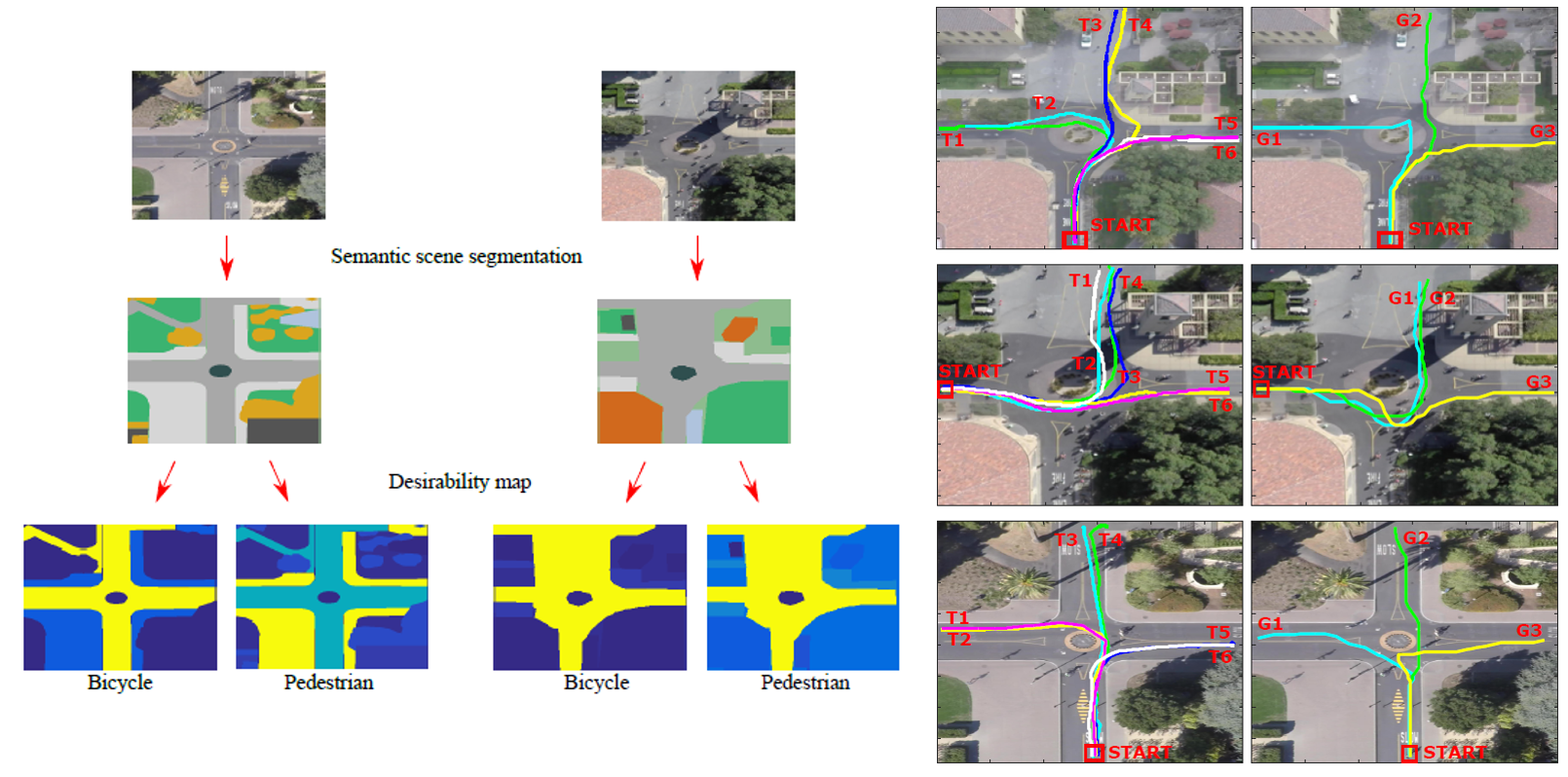
Dynamic Models for Human Dynamics
Polar histograms are used to build prediction models for agents moving in unstructured environments.
- Coscia P., Ballan L., Palmieri F.A.N., Alahi A., Savarese S., "Linear Artificial Forces for Human Dynamics in Complex Contexts." In: Esposito A., Faundez-Zanuy M., Morabito F., Pasero E. (eds) Neural Approaches to Dynamics of Signal Exchanges. Smart Innovation, Systems and Technologies, vol 151. Springer, Singapore; First Online: 19 September 2019; DOI https://doi.org/10.1007/978-981-13-8950-4_3; Print ISBN 978-981-13-8949-8; Online ISBN 978-981-13-8950-4; Also presented at the Italian Workshop on Neural Networks, WIRN 2018, June 13-15, 2018.
- Pasquale Coscia, Francesco Castaldo, Francesco A.N. Palmieri, Alexandre Alahi, Silvio Savarese, Lamberto Balland, "Long-term Path Prediction in Urban Scenarios using Circular Distributions," in Image and Vision Computing, Elsevier, (Available on-line since 5 December 2017), Vol. 69, pp. 81-91, 2018, https://doi.org/10.1016/j.imavis.2017.11.006; Editors Choice Award 2021 (certificate)
- P. Coscia, F. Castaldo, F. A. N. Palmieri, L. Ballan, A. Alahi and S. Savarese, "Point-based path prediction from polar histograms," Proceedings of 19th International Conference on Information Fusion (FUSION), Heidelberg, July 5-8 2016, pp. 1961-1967, ISBN: 9780996452748.
Various scenarios have been experimented to model agents’ motion in urban areas.
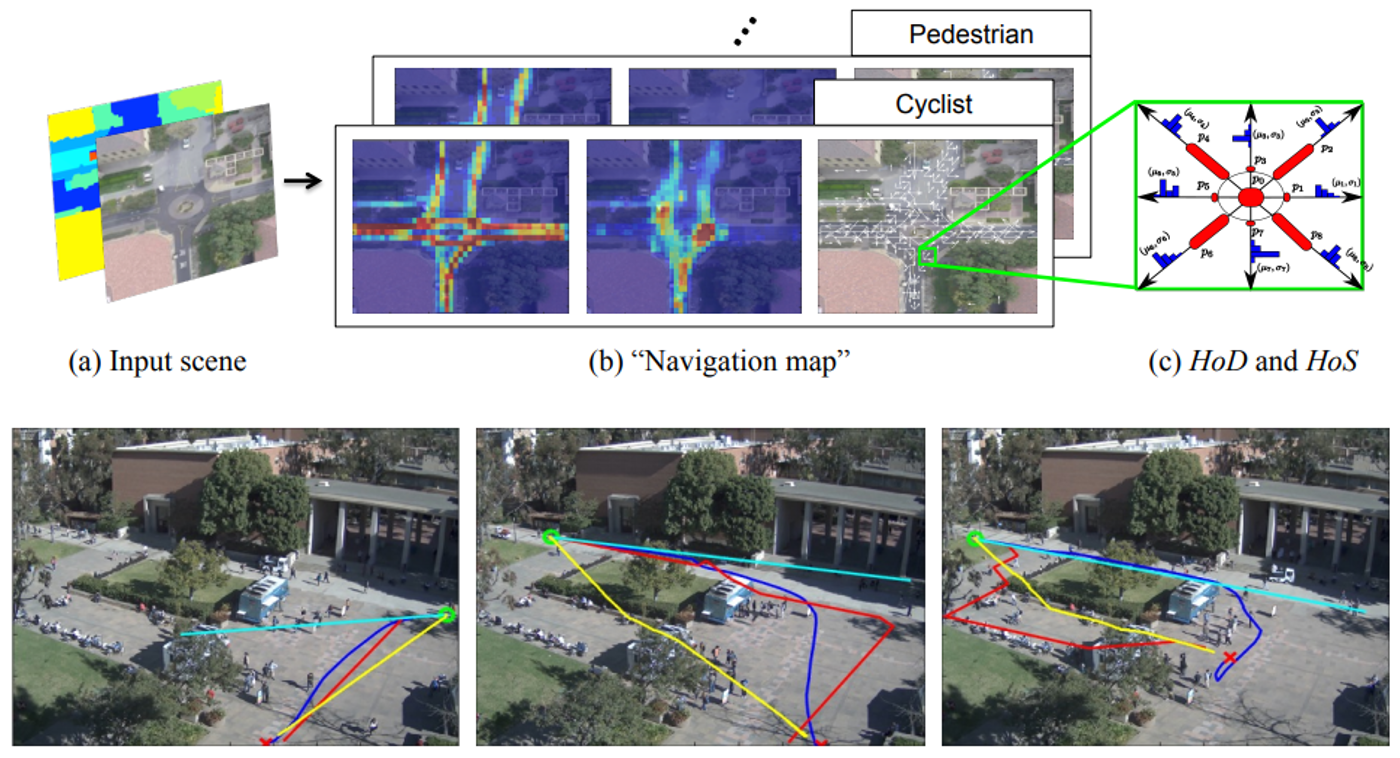
- L. Ballan, F. Castaldo, A. Alahi, F. Palmieri, S. Savarese, "Knowledge transfer for scene-specific motion prediction," Proceedings of European Conference on Computer Vision (ECCV2016), Amsterdam, Oct. 11-14, 2016, Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), Springer, pp. 697-713,; ISBN: 9783319464473; DOI: 10.1007/978-3-319-46448-0_42
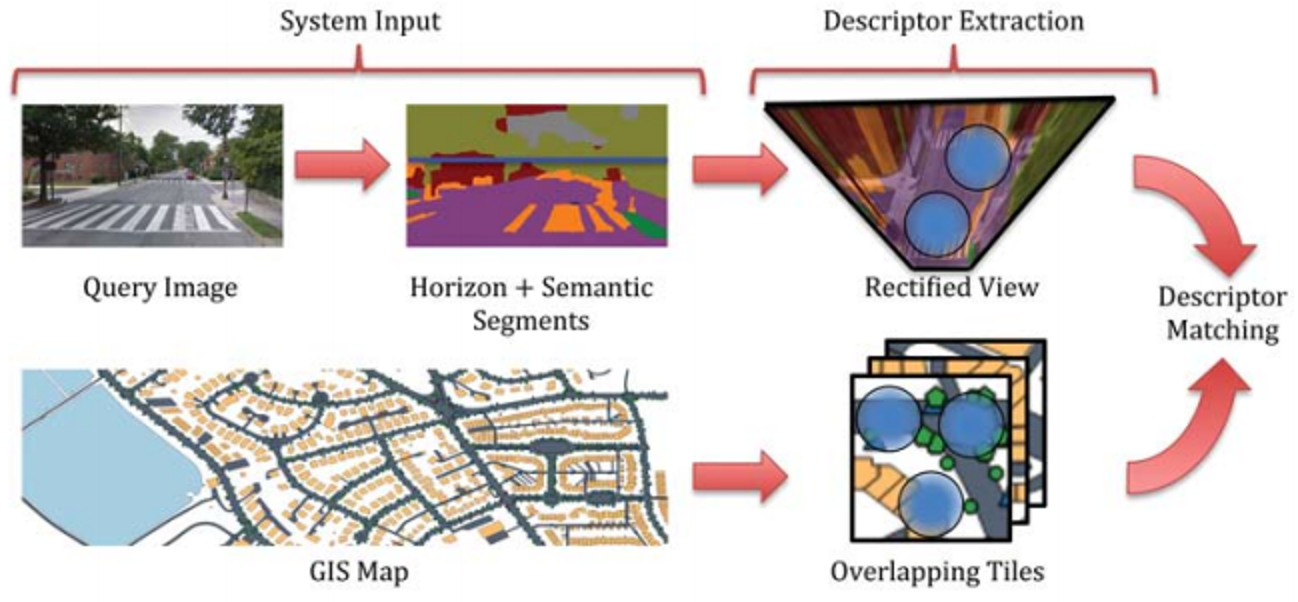
Cross-view Matching
We propose an automatic method for detecting and representing the semantic information of an RGB image with the goal of performing cross-view matching with a (non-RGB) geographic information system (GIS).
- F. Castaldo, A. Zamir, R. Angst, F. A. N. Palmieri, S. Savarese, "Semantic Cross-View Matching," Proceedings of The IEEE International Conference on Computer Vision (ICCV) Workshops, 2015, pp. 9-17, [Best Paper Honorable Mention Award], available on line link, and also on arXiv:1511.00098v1.
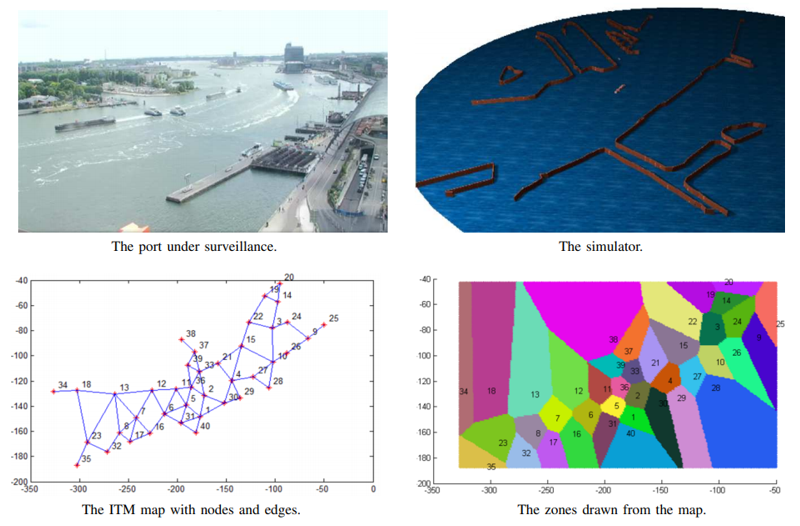
Vessel Behaviour Modelling for Maritime Environments
Various models for motion have been applied to ships in realistic environments.
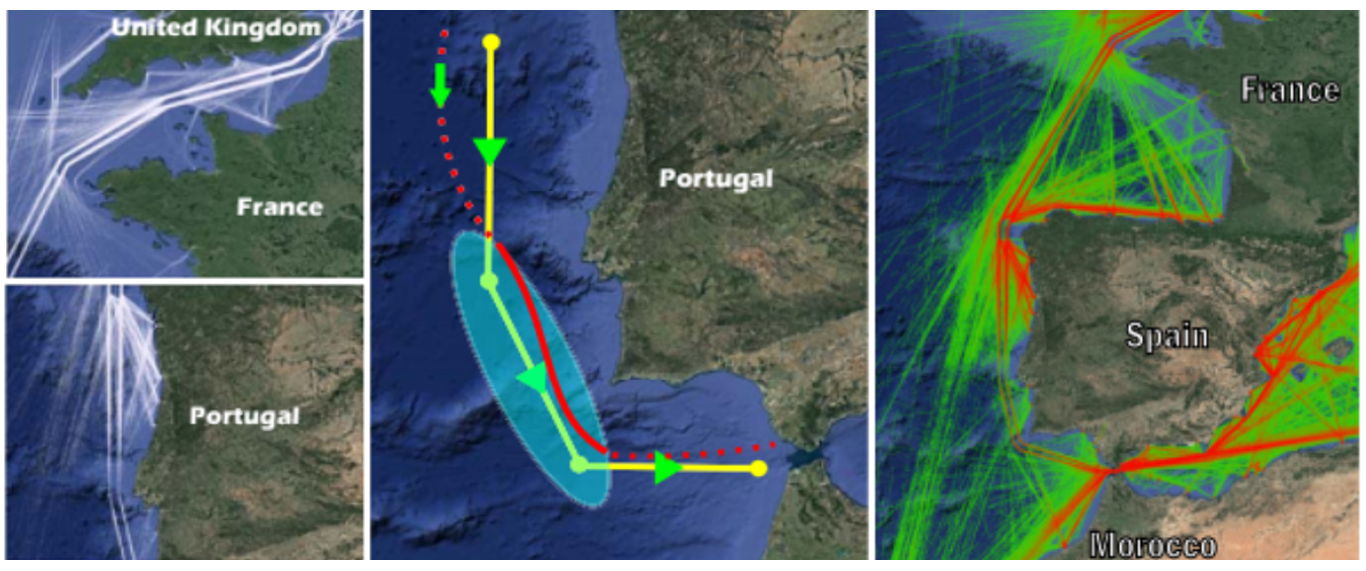
- Pasquale Coscia, Paolo Braca, Leonardo Maria Millefiori, Francesco A. N. Palmieri, Peter Willett, "Unsupervised Maritime Traffic Graph Learning with Mean-Reverting Stochastic Processes," Proceedings of the 21st International Conference on Information Fusion (FUSION 2018), Cambridge UK, 10-13 July 2018, pp. 1822-1828, DOI: 10.23919/ICIF.2018.8455392, Electronic ISBN: 978-0-9964527-6-2 USB ISBN: 978-0-9964527-7-9.
- P. Coscia, P. Braca, L. M. Millefiori, F. A. N. Palmieri and P. Willett, "Multiple Ornstein-Uhlenbeck Processes for Maritime Traffic Graph Representation," in IEEE Transactions on Aerospace and Electronic Systems, vol. 54, Issue 5, Oct. 2018, pp. 2158-2170; doi: 10.1109/TAES.2018.2808098; Print ISSN: 0018-9251; Online ISSN: 1557-9603.
- F. Castaldo, F. A. N. Palmieri and C. S. Regazzoni, "Bayesian Analysis of Behaviors and Interactions for Situation Awareness in Transportation Systems," in IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 2, pp. 313-322, Feb. 2016; doi: 10.1109/TITS.2015.2466695; ISSN : 1524-9050; (Published on 28 August 2015).
- Castaldo F., Palmieri F.A.N., Regazzoni C., "Application of Bayesian Techniques to Behavior Analysis in Maritime Environments". In: Bassis S., Esposito A., Morabito F. (eds) Advances in Neural Networks: Computational and Theoretical Issues. Smart Innovation, Systems and Technologies, vol 37. Springer, Cham (WIRN 2014); DOI: https://doi.org/10.1007/978-3-319-18164-6_17; Publisher Name: Springer, Cham; Print ISBN: 978-3-319-18163-9; Online ISBN: 978-3-319-18164-6 (2015).
- F. Castaldo, V. Bastani, L. Marcenaro, F. A. N. Palmieri and C. Regazzoni, "Abnormal Vessel Behavior Detection in Port Areas Based on Dynamic Bayesian Networks," Proceedings of the 17th International Conference on Information Fusion, FUSION 2014, July 7-10, Salamanca, Spain.
- F. Castaldo, F. A.N. Palmieri, V. Bastani, L. Marcenaro and Carlo Regazzoni, "Bayesian Analysis of Ship-to-Ship Interactions for Port Safety," Proceedings of the IEEE International Conference on Advanced Video and Signal-Based Surveillance, AVSS2014, Aug 26-29, 2014, HanaSquare, Seoul, Korea. DOI: 10.1109/AVSS.2014.6918688